중량물 적용을 위한 4D 셔틀 시스템
설명
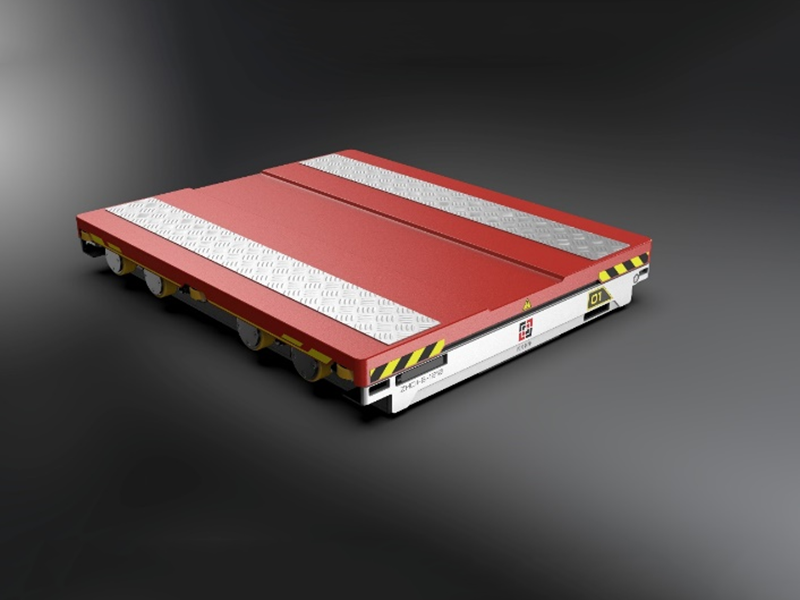
지능형 고밀도 저장 시스템의 핵심 장비인 4D 셔틀은 주로 프레임 조합, 전기 시스템, 전원 공급 시스템, 구동 시스템, 리프팅 시스템, 센서 시스템 등으로 구성됩니다. 원격 제어, 수동, 반자동, 로컬 자동, 온라인 자동의 5가지 모드를 지원합니다. 다중 보안 보호 및 보안 경고, 지역 보안 경보, 운영 보안 경보, 대화형 보안 경보 기능을 갖추고 있습니다. 케이스는 가스 차폐 용접과 고강도 볼트로 연결됩니다. 랙 조합은 이중 레이어 구조를 채택했습니다. 외관은 모두 스프레이 도장 처리되었으며, 가공 부품과 전기 브래킷은 전기 도금 처리되었습니다. 2세트의 구동 시스템과 2세트의 리프팅 시스템으로 구성되어 있습니다. 구동 시스템은 XY 방향을 담당합니다. 리프팅 시스템 중 하나는 화물 리프팅을 담당하고, 다른 하나는 1차선과 2차선 전환을 담당합니다. 높이 Z 방향은 맞춤형 엘리베이터를 사용하여 4D 셔틀의 레이어 변경을 구현할 수 있습니다. 이를 통해 3차원 공간 접근 기능을 구현할 수 있습니다.
고하중형의 구조는 기본적으로 표준형과 동일합니다. 주요 차이점은 하중 용량이 크게 향상되어 운반 용량이 표준형의 거의 두 배에 달한다는 것입니다. 리프팅 메커니즘의 하중 지지 설계가 강화되었고, 리프팅 모터의 출력이 증가하여 하중 지지 용량이 최대 2.5톤에 도달할 수 있습니다. 주행 모터의 출력은 변경되지 않습니다. 출력을 높이기 위해 감속비가 증가했고, 이에 따라 4D 셔틀의 주행 속도가 감소합니다.
표준 비즈니스
창고에서 영수증 조립 및 보관
이전 및 재고 청구 변경 계층
기술적 매개변수
| 프로젝트 | 기본 데이터 | 주목 | |
| 모델 | SX-ZHC-T-1210-2T | ||
| 적용 가능한 트레이 | 폭: 1200mm 깊이: 1000mm | ||
| 최대 하중 | 최대 2500kg | ||
| 키/몸무게 | 차체 높이: 150mm, 셔틀 무게: 350KG | ||
| 주요 X 방향으로 걷기 | 속도 | 최대 무부하: 1.5m/s, 최대 전부하: 1.0m/s | |
| 보행 가속도 | ≤ 1.0m/초2 | ||
| 모터 | 무브러시 서보 모터 48VDC 1 5 00W | 수입 서보 | |
| 서버 드라이버 | 브러시리스 서보 드라이버 | 수입 서보 | |
| Y 방향으로 걷기 | 속도 | 최대 무부하 : 1.0m/s, 최대 전부하 : 0.8m/s | |
| 보행 가속도 | ≤ 0.6m/초2 | ||
| 모터 | 무브러시 서보 모터 48VDC 1500W | 수입 서보 | |
| 서버 드라이버 | 브러시리스 서보 드라이버 | 수입 서보 | |
| 화물 잭킹 | 잭킹 높이 | 30mm _ | |
| 모터 | 무브러시 모터 48VDC 75 0W | 수입 서보 | |
| 메인 잭킹 | 잭킹 높이 | 35mm | |
| 모터 | 무브러시 모터 48VDC 75 0W | 수입 서보 | |
| 메인 채널/포지셔닝 방법 | 보행 위치 지정: 바코드 위치 지정 / 레이저 위치 지정 | 독일 P+F/SICK | |
| 2차 채널/위치 지정 방법 | 보행 위치: 광전 + 인코더 | 독일 P+F/SICK | |
| 트레이 위치 지정: 레이저 + 광전 | 독일 P+F/SICK | ||
| 제어 시스템 | S7-1200 PLC 프로그래밍 가능 컨트롤러 | 독일 지멘스 | |
| 리모컨 | 작동 주파수 433MHZ, 통신 거리 최소 100m | 맞춤형 가져오기 | |
| 전원 공급 장치 | 리튬 배터리 | 국내산 고품질 | |
| 배터리 매개변수 | 48V, 30AH, 사용 시간 ≥ 6h, 충전 시간 3h, 충전 가능 횟수: 1000회 | 차량 크기에 따라 용량이 달라질 수 있습니다. | |
| 속도 제어 방법 | 서보 제어, 저속 일정 토크 | ||
| 크로스바 제어 방식 | WCS 스케줄링, 터치컴퓨터 제어, 원격제어 제어 | ||
| 작동 소음 수준 | ≤60데시벨 | ||
| 페인팅 요구 사항 | 랙 조합(검정색), 상단 커버 빨간색, 전면 및 후면 알루미늄 흰색 | ||
| 주변 온도 | 온도: 0℃~50℃ 습도: 5% ~ 95% (결로 현상 없을 것) | ||


