정보 4D 셔틀 컨베이어 시스템





체인 컨베이어
| 프로젝트 | 기본 데이터 | 주목 |
| 모델 | SX-LTJ-1.0T -600H | |
| 모터 감속기 | 꿰매다 | |
| 구조 유형 | 프레임은 알루미늄 합금으로 제작되었으며, 다리와 굽힘 부분은 탄소강으로 제작되었습니다. | |
| 제어 방법 | 수동/독립형/온라인/자동 제어 | |
| 보안 조치 | 전기 인터록, 양쪽에 보호 가이드 | |
| 표준을 채택하다 | JB/T7013-93 | |
| 유효 탑재량 | 최대 1000KG | |
| 화물 검사 | 광전 센서 | 아프다/P+F |
| 체인 트랙 | 저마찰 나일론 트랙 | |
| 컨베이어 체인 | 동화체인 | |
| 베어링 | 후쿠야마 하드웨어, 밀봉형 볼 베어링 | |
| 전송 속도 | 12m/분 | |
| 표면 처리 및 코팅 | 산세척, 인산염 처리, 분무 | |
| 소음 제어 | ≤73데시벨 | |
| 표면 코팅 | 컴퓨터 회색 | 첨부된 견본 |
장비 구조
컨베이어는 프레임, 아웃리거, 구동 장치 등으로 구성됩니다. 프레임은 알루미늄 합금으로 제작되었으며, 양쪽 끝은 고정된 무치 후진 휠입니다. 컨베이어 체인은 피치 P=15.875mm의 직선 복열 체인입니다. 체인 지지대는 자체 윤활 효과가 있는 고분자 폴리에틸렌(UHMW)으로 제작되었습니다. 용접된 아웃리거는 볼트 압력 플레이트로 메인 프레임에 연결되고, M20 나사 조정 다리는 지면에 연결되며, 이송 표면의 높이는 +25mm까지 조정 가능합니다. 구동 장치는 중앙에 내장된 감속 모터, 구동축 어셈블리, 변속 스프로킷 세트, 모터 시트 및 체인 텐셔닝 장치로 구성되며, 나사식 조정 텐셔너 풀리는 이송 체인의 텐셔닝을 담당합니다.
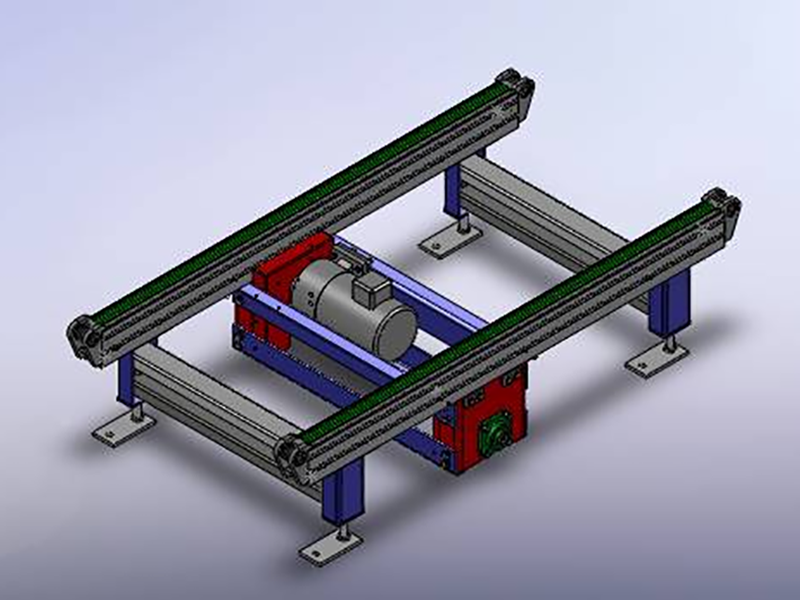
작동 원리:
모터는 전달 그룹을 통해 구동축을 구동하고, 구동축은 운반 체인을 구동하여 팔레트의 운반 기능을 실현합니다.
롤러 컨베이어
| 목 | 기본 데이터 | 비고 |
| 모델 | SX-GTJ-1.0T -600H | 철골 구조 |
| 모터 감속기 | 꿰매다 | |
| 구조 유형 | 탄소강 굽힘 | |
| 제어 방법 | 수동/독립형/온라인/자동 제어 | |
| 유효 탑재량 | 최대 1000KG | |
| 전송 속도 | 12m/분 | |
| 롤러 | 76 더블 체인 롤러 | |
| 구동 체인 | 화동 체인 공장 | |
| 베어링 | 하축 | |
| 표면 처리 및 코팅 | 산세척, 인산염 처리, 분무 | |
장비 구조
장비 구조: 롤러 테이블 머신은 프레임, 아웃리거, 롤러, 구동 장치 및 기타 장치로 구성됩니다. 롤러는 φ76x3 단면 이중 스프로킷, 아연 도금 롤러, 롤러 간격 P=174.5mm, 단면 이중 스프로킷입니다. 용접된 아웃리거는 볼트 압력판을 통해 메인 프레임에 연결되고, M20 나사 조정 다리는 지면에 연결되며, 이송 표면의 높이는 +25mm까지 조정 가능합니다. 구동 장치는 중앙에 내장된 감속 모터, 변속 스프로킷 세트, 모터 시트, 체인 텐셔닝 장치로 구성됩니다.
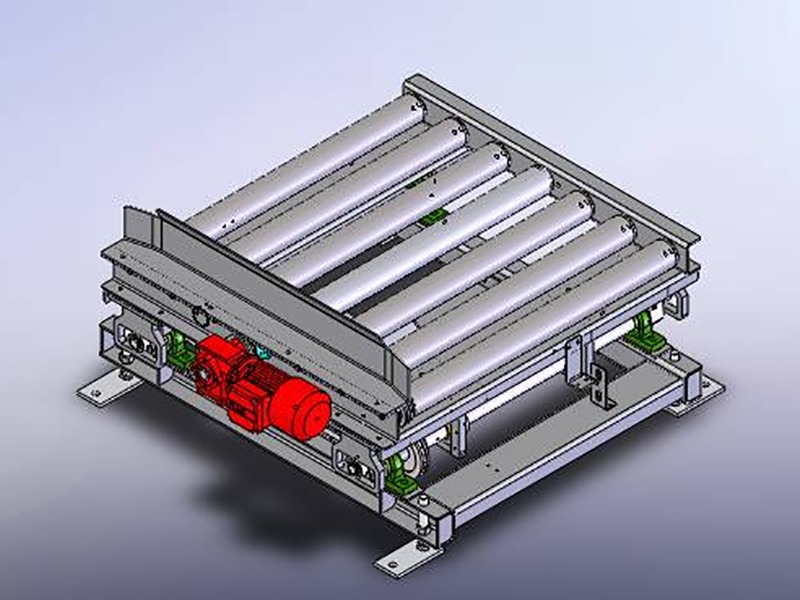
작동 원리: 모터가 체인을 통해 롤러를 구동하고, 롤러는 다른 체인을 통해 인접한 롤러로 전달되고, 다시 또 다른 롤러로 전달되어 컨베이어의 전달 기능을 실현합니다.
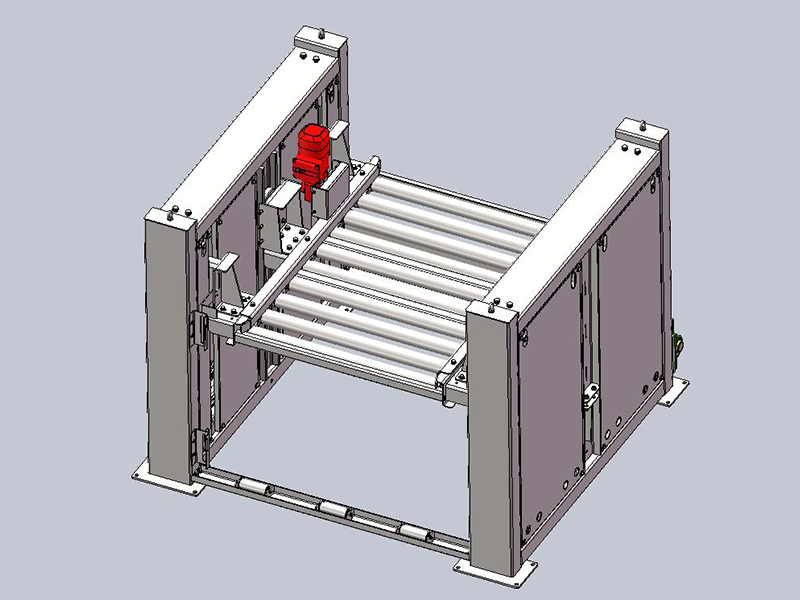
잭킹 및 이송기
| 프로젝트 | 기본 데이터 | 주목 |
| 모델 | SX-YZJ-1.0T-6 0 0H | 철골 구조 |
| 모터 감속기 | 꿰매다 | |
| 구조 유형 | 탄소강 굽힘 | |
| 제어 방법 | 수동/독립형/온라인/자동 제어 | |
| 보안 조치 | 전기 인터록, 양쪽에 보호 가이드 | |
| 기준 | JB/T7013-93 | |
| 유효 탑재량 | 최대 1000KG | |
| 화물 검사 | 광전 센서 | 아프다/P+F |
| 롤러 | 76 더블 체인 롤러 | |
| 베어링 및 하우징 | 베어링: 하얼빈 샤프트; 베어링 시트: 푸산 FSB | |
| 전송 속도 | 12m/분 | |
| 표면 처리 및 코팅 | 산세척, 인산염 처리, 분무 | |
| 소음 제어 | ≤73dB | |
| 표면 코팅 | 컴퓨터 회색 | 첨부된 견본 |
장비 구조
장비 구조: 롤러 이송기는 이송 부품, 리프팅 메커니즘, 가이드 부품 및 기타 장치로 구성됩니다. 이송면 높이는 +25mm로 조절 가능합니다. 리프팅 메커니즘은 모터 구동 크랭크 암 원리를 채택하고, 구동 장치는 중앙에 내장된 감속 모터, 변속 스프로킷 세트, 모터 시트, 체인 텐셔닝 장치로 구성됩니다.
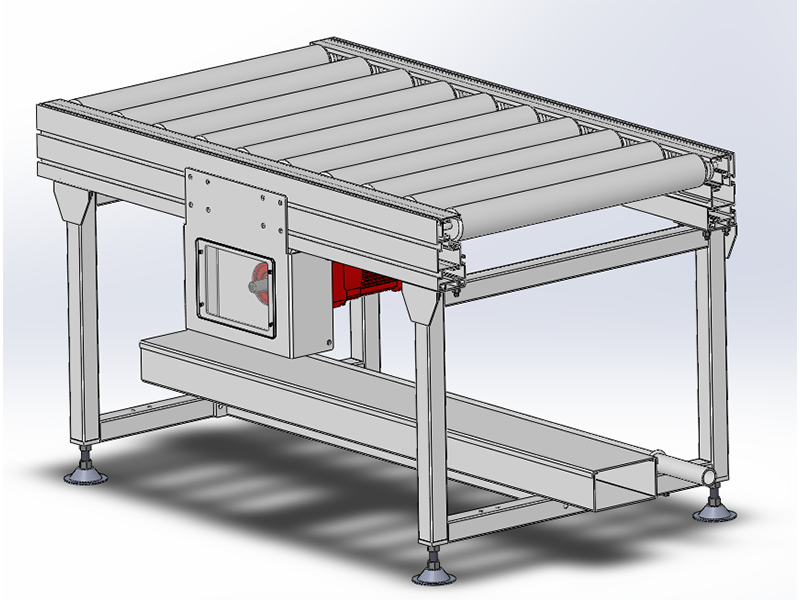
작동 원리: 팔레트가 매칭 컨베이어에 의해 장비로 운반되면 잭킹 모터가 작동하여 캠 메커니즘을 구동하여 팔레트를 들어올리고, 팔레트가 제자리에 있으면 잭킹 모터가 멈춥니다. 운반 모터가 작동하여 팔레트를 도킹 장비로 운반하고, 모터가 멈추면 잭킹 모터가 작동하고, 캠 메커니즘이 구동되어 장비를 내리고, 장비가 제자리에 있으면 잭킹 모터가 멈춰 작업 사이클을 완료합니다.
전환 컨베이어
| 1) 프로젝트 | 기본 데이터 | 주목 |
| 모델 | SX-GDLTJ-1.0T-500H-1.6L | |
| 모터 감속기 | 꿰매다 | |
| 구조 유형 | 다리와 구부러진 탄소강 | |
| 제어 방법 | 수동/독립형/온라인/자동 제어 | |
| 보안 조치 | 전기 인터록, 양쪽에 보호 가이드 | |
| 기준 | JB/T7013-93 | |
| 유효 탑재량 | 최대 1000KG | |
| 화물 검사 | 광전 센서 | 아프다/P+F |
| 체인 트랙 | 저마찰 나일론 트랙 | |
| 컨베이어 체인 | 동화체인 | |
| 베어링 및 하우징 | 베어링 : 하얼빈 샤프트, 베어링 시트 : 후쿠야마 FSB | |
| 전송 속도 | 12m/분 | |
| 표면 처리 및 코팅 | 산세척, 인산염 처리, 분무 | |
| 소음 제어 | ≤73dB | |
| 표면 코팅 | 컴퓨터 회색 | 첨부된 견본 |
장비 구조
장비 구조: 본 장비는 호이스트와 선반의 연결부에 사용되며, 컨베이어는 프레임, 아웃리거, 그리고 구동 장치로 구성됩니다. 컨베이어 체인은 피치 P=15.875mm의 직선 복열 체인입니다. 체인 지지대는 자체 윤활 효과가 있는 고분자 폴리에틸렌(UHMW)으로 제작됩니다. 용접된 다리는 선반 본체에 연결됩니다. 구동 장치는 중앙에 내장된 감속 모터, 구동축 어셈블리, 변속 스프로킷 세트, 모터 시트, 그리고 체인 텐셔닝 장치로 구성되며, 나사식 조절 텐셔너 풀리가 컨베이어 체인의 장력을 조절합니다.
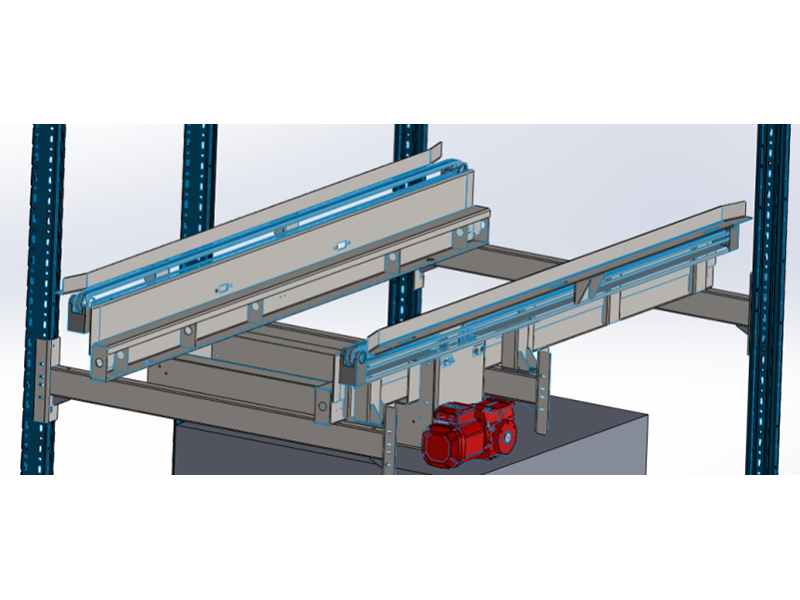
작동 원리: 모터는 전달 그룹을 통해 구동축을 구동하고, 구동축은 운반 체인을 구동하여 팔레트의 운반 기능을 실현합니다.
바닥 리프트
| 프로젝트 | 기본 데이터 | 주목 |
| 모델 | LDTSJ-1.0T-700H | 철골 구조 |
| 모터 감속기 | 꿰매다 | |
| 구조 유형 | 컬럼 : 탄소강 굽힘 외측 : 강판 씰 | |
| 제어 방법 | 수동/독립형/온라인/자동 제어 | |
| 보안 조치 | 전기식 인터록, 낙하 방지 장치 | |
| 기준 | JB/T7013-93 | |
| 유효 탑재량 | 최대 1000KG | |
| 화물 검사 | 광전 센서 | 아프다/P+F |
| 롤러 | 76 더블 체인 롤러 | |
| 리프팅 체인 | 동화체인 | |
| 베어링 | 일반 베어링: 하얼빈 샤프트 키 베어링: NSK | |
| 달리기 속도 | 운반 속도: 16m/min, 리프팅 속도: 6m/min | |
| 표면 처리 및 코팅 | 산세척, 인산염 처리, 분무 | |
| 소음 제어 | ≤73dB | |
| 표면 코팅 | 컴퓨터 회색 | 첨부된 견본 |
주요 구조 및 특징
프레임: 5mm 탄소강 굽힘판을 기둥으로 사용하고, 외부는 강판으로 밀봉합니다.
리프팅 부분:
호이스트 상단에 리프팅 프레임이 설치되는데, 프레임은 탄소강으로 만들어지고, 리프팅 모터는 리프팅 스프로킷 어셈블리를 구동하여 체인을 통해 작동합니다.
로딩 플랫폼:
탄소강으로 제작되었습니다. 적재 플랫폼에는 표준 컨베이어가 장착되어 있습니다.
작동 원리:
리프팅 모터는 적재 플랫폼을 구동하여 리프팅 작업을 완료합니다. 적재 플랫폼의 컨베이어는 물품이 엘리베이터에 원활하게 들어가고 나올 수 있도록 합니다.



